Overview#
This is the documentation for building and using a retractable lever.
This project was developed by Andy Lustig in the Karpova Lab at HHMI's Janelia Research Campus.
Features#
- Receives an input signal to either extend or retract the lever
- Produces an output signal corresponding to the status of the lever (pressed or not pressed)
- pyControl compatible
- Fast - 180ms to extend or retract
- Durable - faceplate and lever are made of aluminum and can hold up to abuse from rodent claws and teeth
- Open source - all files are available on GitHub and can be modified to meet custom needs
Diagrams#
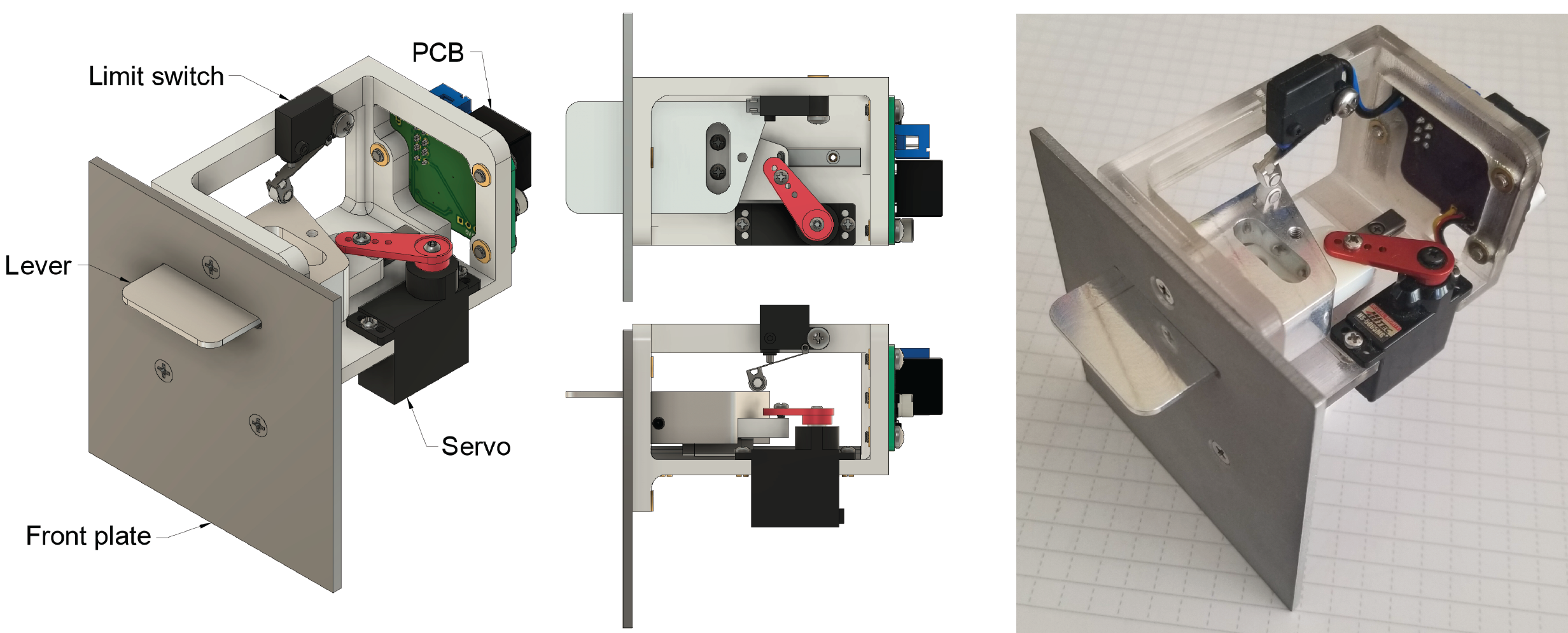
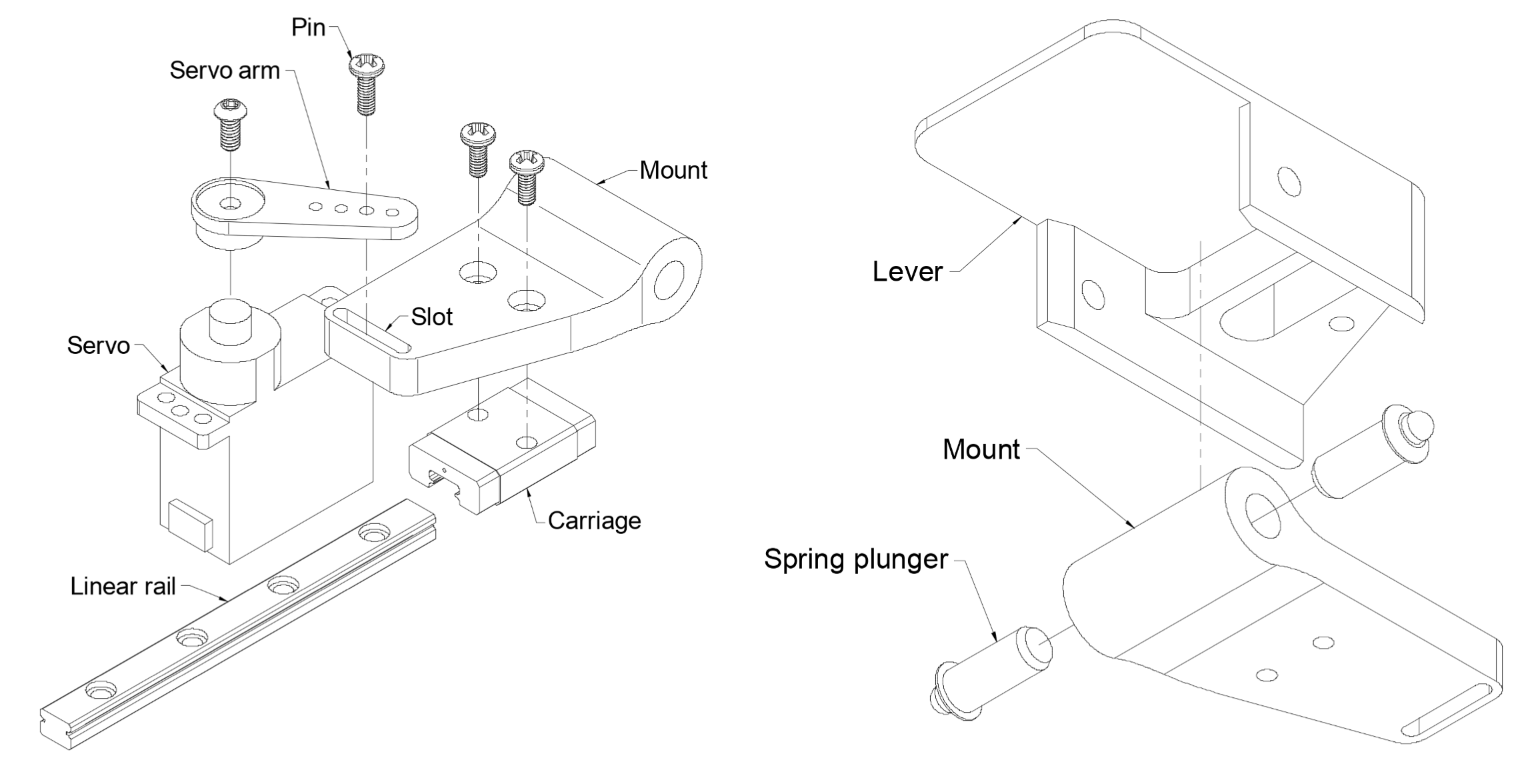
Exploded views#
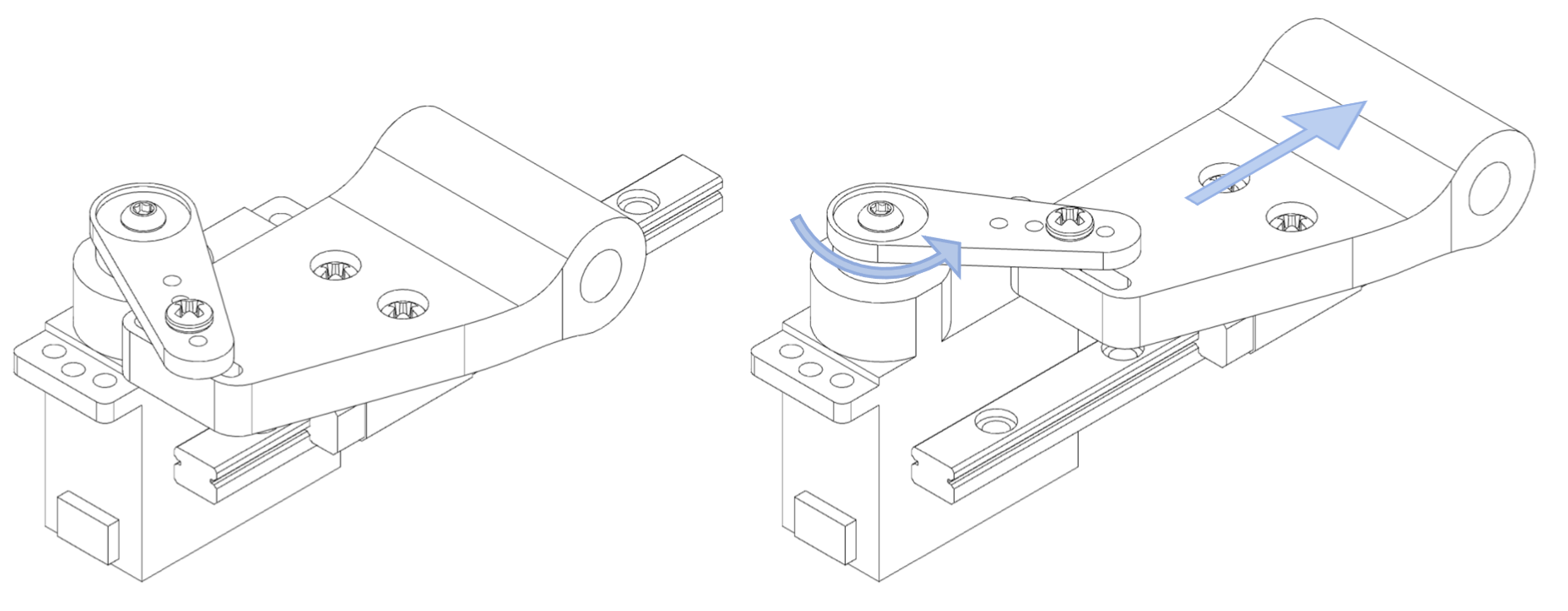
Carriage movement#
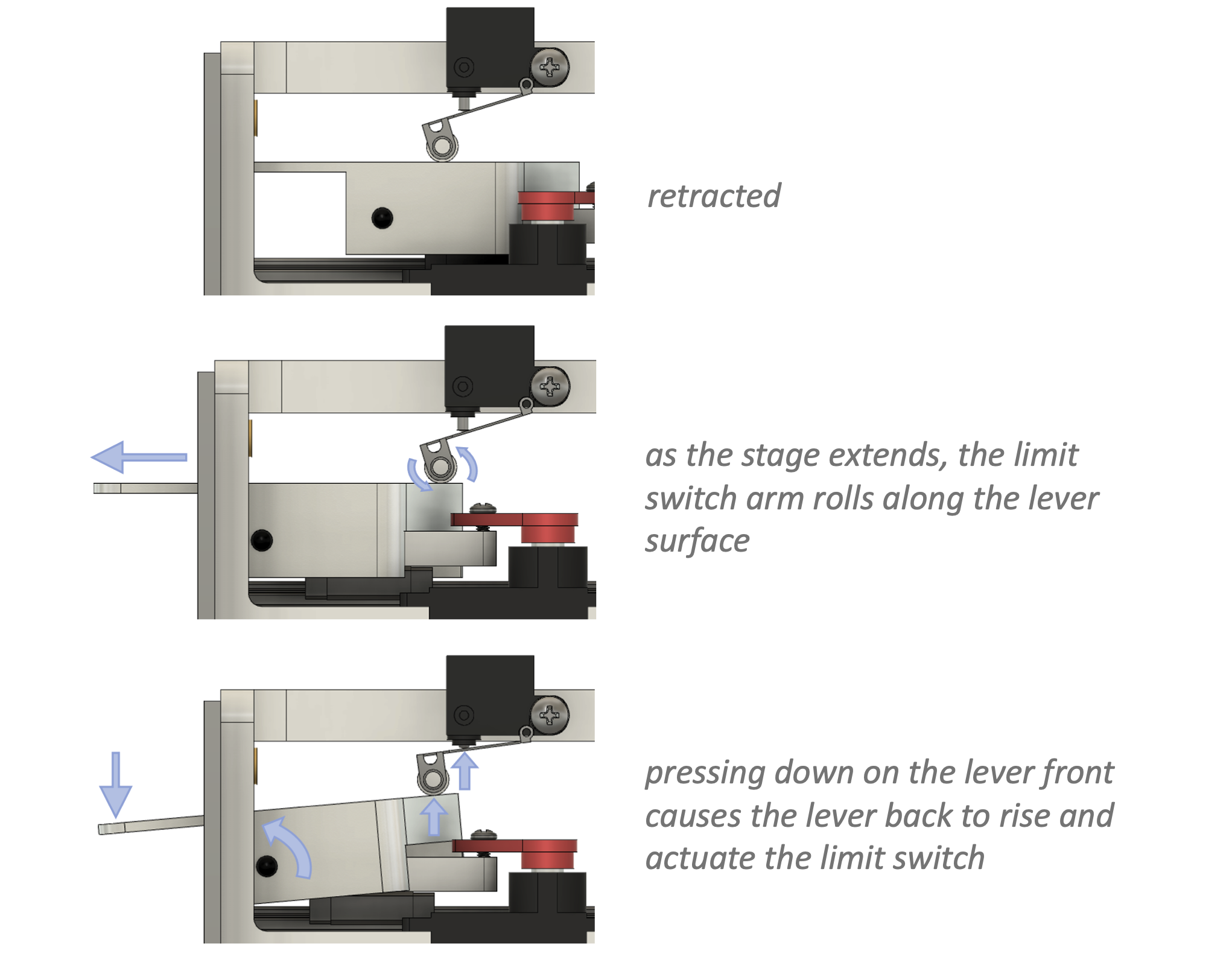
Lever function#